









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
机器人辅助经皮螺钉内固定治疗骨盆和髋臼骨折
[赵春鹏, 王军强, 苏永刚, 韩巍, 周力, 王满宜△  ]
]
]
|
|


目的 评价一种外科手术机器人辅助经皮螺钉内固定治疗骨盆和髋臼骨折手术的安全性与有效性。方法 选择2016年1至4月北京积水潭医院创伤骨科收治的12例骨盆和髋臼骨折患者为研究对象,将试验对象随机分为试验组和对照组,试验组7例采用机器人辅助下医生完成手术,对照组5例采用透视引导下医生徒手完成手术,通过对两组病例的手术总时间、术中透视时间、导针调整次数、螺钉置入位置优良率和不良事件发生率进行统计分析,评价机器人辅助骨盆和髋臼骨折进行经皮螺钉内固定治疗的有效性和安全性。结果 试验组7例患者共置入11枚螺钉,对照组5例患者共置入7枚螺钉。术后CT透视检查确认所有螺钉位置均满意,但两组螺钉的分布差异有统计学意义( P=0.016),试验组优率高于对照组;试验组平均螺钉置入所需透视时间为(7.36±2.63) s,短于对照组的(41.80±13.99) s,差异有统计学意义( P<0.001);试验组术中平均螺钉调整次数为(0.36±0.48)次,少于对照组的(9.00±3.06)次,两组差异具有统计学意义( P=0.003);试验组平均手术时间为(43.86±49.06) min,对照组为(29.00±12.14) min,两组差异无统计学意义( P=0.528)。进行CT透视确认所有螺钉位置满意,未见穿出骨皮质及进入关节腔者,未见伤口感染等其他螺钉置入的相关并发症发生。结论 外科手术机器人适用于辅助进行骨盆和髋臼骨折经皮螺钉内固定治疗,并具有置入准确性高、透视辐射小、安全有效等优点。
Objective: To evaluate the security and efficiency of a surgical robotic assisted percutaneous screw fixation for the treatment of pelvic and acetabular fractures.Methods: In the study, 12 patients with pelvic and acetabular fractures who were treated in Beijing Jishuitan Hospital from January to April in 2016 were involved in this research. The research subjects were randomly divided into two groups: the experimental group and the control group. Robotic-assisted percutaneous sacroiliac screw internal fixations were performed under the guidance of fluoroscopy navigation in the experimental group; in the control group, doctors operated manually guided by fluoroscopy. Statistical analysis was performed on the total operation time, the intraoperative fluoroscopy time, the adjustment numbers of intraoperative guide wires, the excellent rate of screw placement and the incidence of adverse events in order to evaluate the security and efficiency of a surgical robotic assisted percutaneous screw fixation for the treatment of pelvic and acetabular fractures.Results: Eleven screws were placed in 7 patients from the experimental group, while 7 screws were placed in 5 patients from the control group in total. All the screw placement positions were satisfactory according to postoperative CT images. The excellent rates of screw placement position were 100% in both groups. However, the P value was 0.016 based on the comparison between the screws’ distribution in the two groups which meant that the screw distribution of the experimental group was better than that of the control group. The average fluoroscopy time needed for screw insertion was (7.36±2.63) s in the experimental group while (41.80±13.99) s in the control group ( P<0.001). This suggested that the difference between the two groups had statistical significances. Intra-operative fluoroscopy time of the experimental group was significantly smaller than that of the control group. The number of the average screw adjustment was (0.36±0.48) times in the experimental group while (9.00±3.06) times in the control group ( P=0.003). This suggested that the difference of the number of the guide needle adjustment between the two groups had statistical significances, and the number of the experimental group was smaller than that of the control group. The average operation time was (43.86±49.06) min in the experimental group while only (29.00±12.14) min were needed in the control group ( P=0.528) . This suggested that the difference between the two groups had no statistical significance. That is, the total operation time of the two groups was equal. All the screws were in satisfactory positions according to validation results of CT scans. No complications such as screw breaking out the bone cortex and entering into the knee joint cavity, wound infection occurred.Conclusion: Surgical robots are suitable for robot-assisted percutaneous screw fixation in pelvic and acetabular fractures. Robot-assisted treatment of pelvic and acetabular fractures has significant advantages over manual operations including high accuracy, small perspective radiation, safety and efficiency.
骨盆髋臼损伤多由高能量造成, 其发病率约占所有骨科骨折患者的3%, 但致死率却高达13.4%, 并且50%以上的骨盆损伤患者都伴随有其他并发损伤[1]。骨盆髋臼骨折治疗被普遍认为是骨科中的一个难题, 因为骨盆骨折多为不稳定骨折, 而骨盆受到损伤、失去稳定性也会导致周围的软组织等受到损伤, 并容易伴随有其他骨骼损伤以及严重合并症, 特别是在此类骨折早期很容易发生失血性休克等并发症, 极易对患者的生命造成威胁, 所以, 如果骨盆骨折选择的治疗方法不恰当, 就容易造成功能恢复差甚至致残。骨盆和髋臼骨折的治疗通常采用切开复位内固定, 但此类传统治疗方式切口大、出血量多、对患者的身体伤害大, 且传统切开复位内固定手术容易造成术中血管神经的损伤、术后感染等并发症的发生。
随着计算机和导航技术的发展, 微创手术逐渐发展为髋臼骨盆损伤治疗的新趋势, 对于骨盆和髋臼骨折的微创手术, 一般情况下是通过透视引导或基于透视的计算机导航引导进行经皮螺钉置入。基于导航辅助的骶髂关节螺钉内固定术与常规透视引导下的手术操作相比较, 手术透视时间有明显优势, 导航引导下的骶髂螺钉置入手术其术中透视时间约为(0.14~2.10) min, 而徒手操作手术的术中透视时间约为(1.40~4.40) min; 在螺钉置入的准确率上, 导航引导下的骶髂螺钉置入手术准确率可到达95%以上, 而徒手操作的准确率约为76%~95%[2, 3, 4], 但是骨盆部位结构复杂, 骨折位置较深在, 骨性通道较为狭窄, 与主要依赖于医生个人经验技术的传统手术相比, 基于导航透视的治疗方法虽然能够增加螺钉置入的精确性, 降低术中X线辐射损伤, 但其更适用于骨折移位较小、闭合复位的患者[5, 6], 而且即使通过导航技术可以准确定位并引导手术工具到达目标位置, 但受限于人手操作的不稳定性, 以及骨盆区域极其严格的手术定位要求, 要在实际手术操作中达到理想的骨折固定效果仍然比较困难。近年来, 随着手术机器人技术的进步, 外科手术机器人也开始进入骨科应用领域, 目前比较广泛地应用于膝关节和髋关节置换[7, 8]、辅助内固定手术[9], 髓内钉远端锁定[10], 以及辅助骨折复位[11, 12]。
本研究选择北京积水潭医院自2016年1至4月收治的12例骨盆和髋臼微创内固定手术患者进行前瞻性病例对照研究, 并对其手术情况进行分析, 旨在评价外科手术机器人辅助经皮螺钉内固定治疗骨盆和髋臼骨折手术的有效性和安全性。
本研究为随机、开放、平行对照设计, 采用电子交互式网络应答系统将受试者分成试验组(7例)和对照组(5例), 试验组使用TiRobot外科手术机器人辅助实施螺钉内固定手术, 对照组采用常规的透视引导下医生徒手完成螺钉内固定手术。两组病例术中记录手术时间、术中透视时间、导针调整次数等指标, 术后根据影像资料对螺钉位置进行评价, 通过对上述指标进行统计计算, 从而分析外科手术机器人辅助手术和传统透视引导手术的区别, 评价外科手术机器人辅助经皮螺钉内固定治疗骨盆和髋臼骨折手术的有效性和安全性。
外科手术机器人辅助经皮螺钉内固定治疗骨盆和髋臼骨折手术的操作流程是根据传统条件下医生借助术中影像透视操作过程设计, 与传统手术的区别在于借助机器人软件系统代替人规划螺钉位置, 机器人手臂代替人手置入螺钉。手术方法和基本操作流程与骨折分型和置入螺钉位置无直接关系, 因此在病例选择上不考虑骨折分型和置入螺钉的具体部位。
本研究开始前获得北京积水潭医院伦理委员会审查批准, 所有研究对象均签署知情同意书。
试验组入组7例, 有效病例7例, 其中男性5例, 女性2例, 平均年龄39.00(23~62)岁, 平均身高176.00 (172.00~178.00) cm, 平均体重60.5 (53.5~65.0) kg。致伤原因为摔伤3例, 高处坠落伤1例, 重物砸伤1例, 车祸伤2例。受伤到手术的平均时间为4.29 (5~17) d。
对照组入组7例, 2例因手术数据记录不全脱落, 有效病例5例, 其中男性3例, 女性2例, 平均年龄42.00 (24~56)岁, 平均身高173.00 (170.00~ 176.00) cm, 平均体重60.5 (53.5~ 65.0) kg。受伤到手术的平均时间为5.25 (3~7) d。
所有有效病例中, 髋臼骨折4例, 骨折分型分别为横断2例, 双柱2例; 骨盆骨折8例, Tile分型A型3例, B型5例。
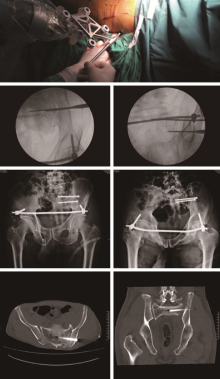
试验采用的TiRobot外科手术机器人由北京天智航医疗科技股份有限公司研究制造, 该设备主要由外科医生通过主控系统(图1), 根据影像设备采集的患者图像进行手术路径的规划, 然后由主控系统根据规划的手术路径空间位置控制多自由度机械臂(图2)运动到目标点, 并通过光学跟踪系统(图3)实时监控机械臂的运动路径偏差以及患者的术中位置变化, 自动进行定位误差的反馈补偿计算, 从而实现术中精准定位。机械臂末端装载有手术工具(如外科工具导向器), 引导术中植入物的准确置入。
 | 图1 主控系统Figure 1 Master console |
 | 图2 机械臂Figure 2 Robotic arm |
 | 图3 光学跟踪系统Figure 3 Optical tracking system |
外科手术机器人辅助经皮螺钉内固定治疗骨盆和髋臼骨折手术的手术流程可以分成图像采集和配准、手术路径规划、机器人辅助置钉和透视验证路径4步。
1.4.1 图像采集和配准 将机器人罩上无菌套, 移动并固定至手术床旁, 确保机械臂工作空间可达手术部位, 光学跟踪相机置于患者足端, 移动式C型臂置于术者对侧, 将患者示踪器安放固定于健侧或患侧髂前上棘, 应用C型臂获取含有机器人定位标记点的术中透视影像, 并将其传输至主控工作站软件进行配准计算。
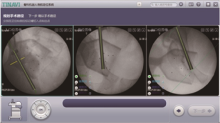
1.4.2 手术路径规划 根据术中采集的图像, 基于典型标识点和骨性标志结构, 在主控系统规划软件上进行手术螺钉路径规划。
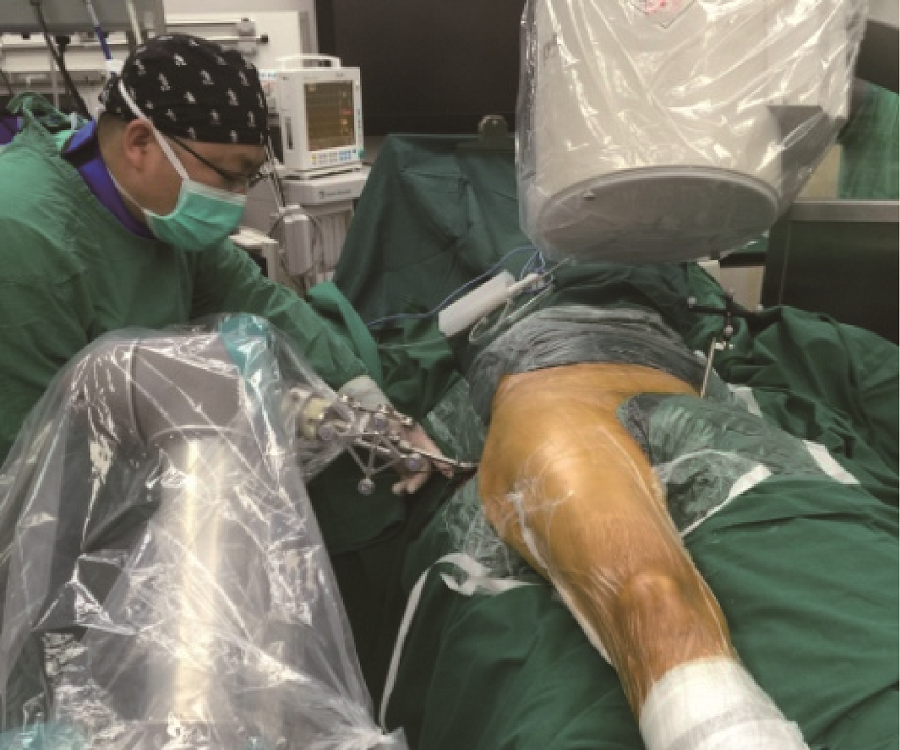
1.4.3 机器人辅助置钉 通过规划软件的仿真模块模拟机械臂的运行姿态, 确认机械臂位置适合后续操作, 由主控系统的控制软件控制和监督机械臂沿规划路径运动到目标位置。在机械臂末端安装导向套筒, 在入钉点做2 cm小切口, 钝性分离皮下组织, 将套筒尖端抵至入钉点骨皮质, 在规划软件上确认入钉点和虚拟探针方向是否符合规划, 如软件显示其与规划路径偏差较大可以对机器人路径进行微调, 路径确认精准后, 透视监控下通过套筒向骨性通道内钻入导针。
1.4.4 透视验证路径 透视确认导针位置后拧入空心螺钉, 最后确认空心螺钉位置良好后撤出导针, 简单冲洗切口透视缝合。
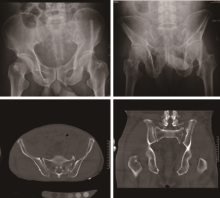
1.5.1 骶髂关节螺钉 用于固定骶髂关节分离或骶骨骨折患者, 患者采用仰卧或俯卧体位(根据术中复位需要选择), 具体手术操作按照机器人手术操作流程进行(图4~6)。
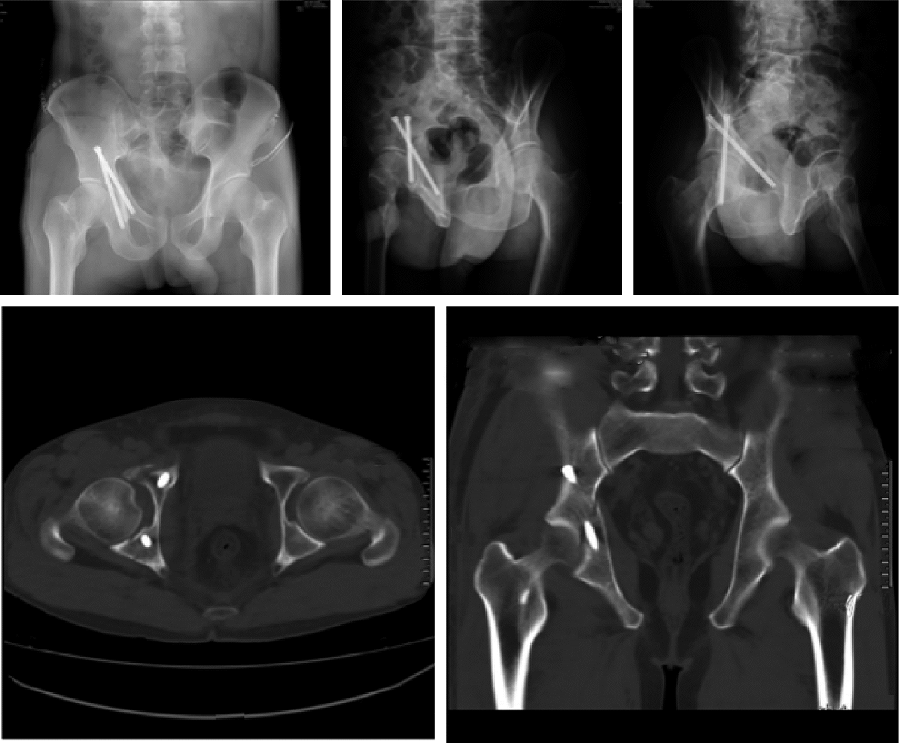
 | 图4 术前骨盆入口位、出口位X线影像与骨盆水平、冠状位CT图像Figure 4 Preoperative images of the pelvis including X-ray images in inlet and outlet view, and horizontal and coronal CT images |
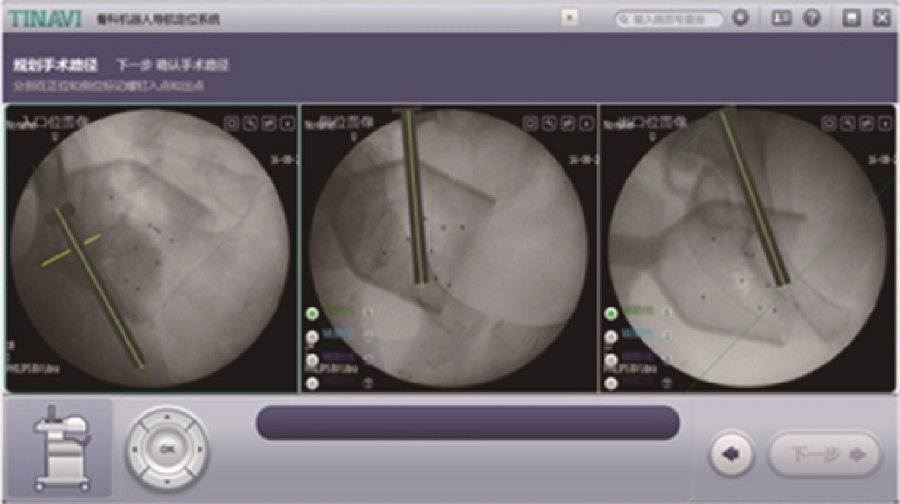
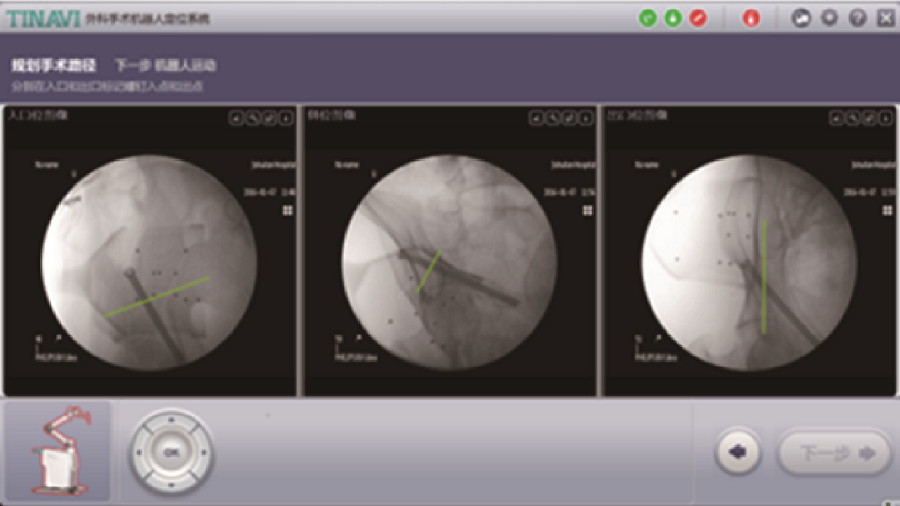
 | 图5 在软件上规划骶髂关节螺钉手术路径Figure 5 Planning the operation path of the sacroiliac joint screw on the software |
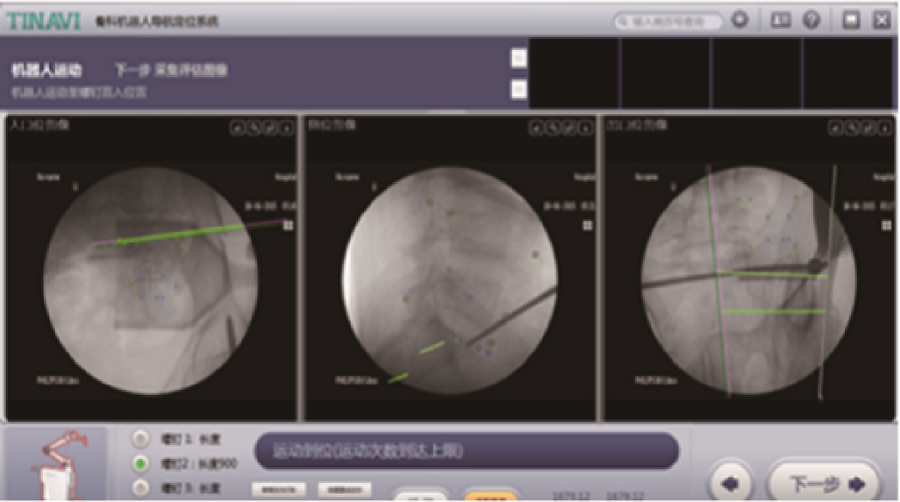
 | 图6 机器人运动到规划位置, 置入导针和螺钉, 术后检查影像Figure 6 Robot moves to the planning position, place the needles and screws, postoperative images |
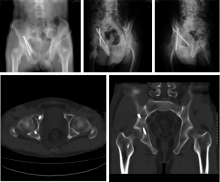
1.5.2 髋臼前柱/后柱螺钉 用于固定髋臼前柱/后柱骨折, 患者仰卧体位, 根据骨折复位固定需要选择固定髋臼前柱或后柱, 机器人操作按照流程要求进行。不同于其他位置螺钉可以完全经皮置入, 髋臼后柱螺钉由于要通过髂窝置入, 而髂窝浅层有髂腰肌、股神经和腹腔内肠管, 为防止螺钉置入过程中误伤重要组织结构, 不采用传统经皮小切口, 而是在髂骨翼切一个4 cm左右切口, 分离髂腰肌等组织到内侧, 形成一个髂骨和髂腰肌之间的安全通道, 然后机器人根据规划指令通过安全通道运动到达置入螺钉位置(图7~12)。
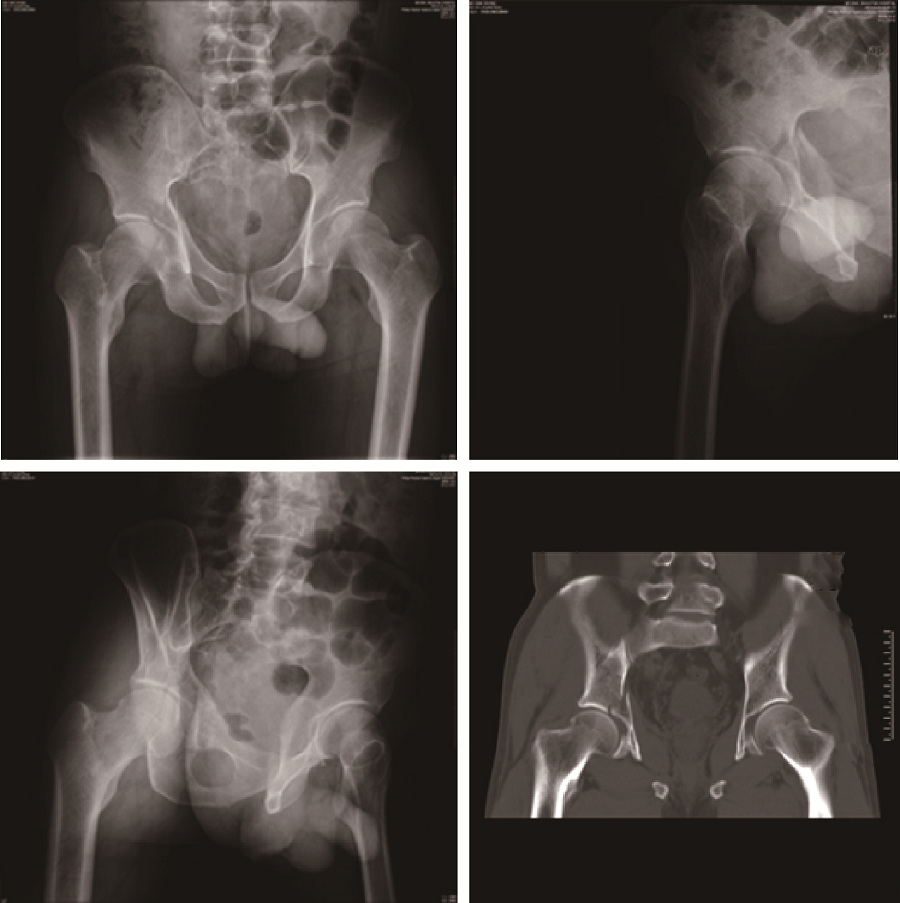 | 图7 术前骨盆正位、闭孔斜位、髂骨斜位X线影像与骨盆冠状位CT图像Figure 7 Preoperative images of the pelvis including X-ray images in anteroposterior view, obturator oblique view andiliac oblique view, and coronal CT images |
 | 图8 在软件上规划髋臼前柱螺钉手术路径Figure 8 Planning the operation path of the acetabular anterior column screw on the software |
 | 图9 机器人运动到前柱螺钉规划位置Figure 9 Robot moves to the planning position |
 | 图10 在软件上规划髋臼后柱螺钉手术路径Figure 10 Planning the operation path of the acetabular posterior column screw on the software |
 | 图11 机器人运动到后柱螺钉规划位置Figure 11 Robot moves to the planning position |
 | 图12 术后骨盆正位、闭孔斜位、髂骨斜位X线影像与骨盆水平位、冠状位CT图像Figure 12 Postoperative images of the pelvis including X-ray images in anteroposterior view, obturator oblique view and iliac oblique view, and horizontal and coronal CT images |
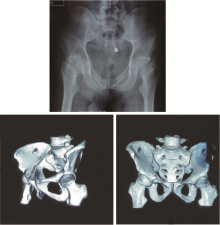
1.5.3 髋臼顶螺钉(用于固定髋臼顶高位柱的骨折) 患者仰卧体位, 除外为满足螺钉置入所采集图像不同外, 机器人辅助手术操作同前(图13~16)。
 | 图13 术前骨盆正位影像与CT三维重建图像Figure 13 Preoperative images of the pelvic including X-ray image in anteroposterior view and the CT 3D reconstruction image |
 | 图14 在软件上规划髋臼顶螺钉手术路径Figure 14 Planning the operation path of the acetabular roof screw on the software |
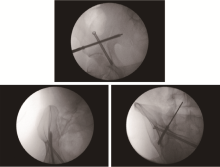
 | 图15 术中通过透视骨盆闭孔斜位、髂骨斜位、闭孔出口斜位验证髋臼顶螺钉位置Figure 15 Intraoperative pelvic perspective examination of the acetabular roof screws in obturator oblique view, iliac oblique view andobturator outlet oblique view |
 | 图16 术后CT三维重建图像验证髋臼顶和髋臼前柱螺钉位置Figure 16 Postoperative CT 3D reconstruction images to verify screw positions of the acetabular roof and the acetabular anterior column |
1.6.1 有效性评价 记录术中的累计透视时间(若1个病例置入多枚螺钉则计算均值)、术中导针调整次数、手术时间(从开始进行手术到手术结束的时间)。对入组的所有患者进行CT检查, 由专家通过盲法评价螺钉置入位置是否满意, 计算螺钉置入位置优良率。螺钉置入位置的评价分级标准:(1)优:螺钉完全在通道内; (2)良:螺钉部分接触皮质骨但无穿出; (3)差:螺钉穿出皮质骨或进入关节内。
1.6.2 安全性评价 记录试验期间发生的不良事件, 计算并比较试验组和对照组的不良事件发生率。
采用SPSS 22.0软件进行计算, 对术中透视时间、导针调整次数以及手术时间等定量指标采用t检验, 采用Fisheries精确概率法统计分析两组螺钉位置的分布, P< 0.05认为差异具有统计学意义。
试验组平均螺钉置入所需透视时间为(7.36± 2.63) s, 对照组为(41.80± 13.99) s, 两组差异具有统计学意义(P< 0.001); 试验组术中平均螺钉调整次数为(0.36± 0.48)次, 对照组为(9.00± 3.06)次, 两组差异具有统计学意义(P=0.003); 试验组平均手术时间为(43.86± 49.06) min, 对照组为(29.00± 12.14) min, 但两组差异无统计学意义(P=0.528)。
两组患者置入螺钉的位置分布情况:试验组共置入螺钉11枚, 螺钉位置评价全部为优, 优率100%; 对照组置入螺钉7枚, 其中4枚为优, 3枚为良, 优率为57.1%。采用Fisher精确概率法比较试验组和对照组螺钉分布的差异具有统计学意义(P=0.016)。
每位患者进行术后X线片和术后CT验证, 外科医生通过术后影像资料确认所有螺钉位置满意, 未见穿出骨皮质及进入关节腔者, 未见伤口感染等其他螺钉置入的相关并发症发生, 未发现与试验设备相关的不良事件。
传统的切开复位内固定技术一直是治疗骨盆和髋臼骨折的标准手术, 但可能会合并严重的并发症[13], 因此临床医生一直在探索新的技术, 希望既能对骨折进行稳定地固定, 又能最大限度地减少手术操作对机体带来的损伤。骶髂关节螺钉经皮固定技术在治疗复杂骨盆环骨折中的应用越来越广, 但施行这类技术具有一定的风险性, 对术者临床经验的要求较高, 只有对骨盆结构和局部软组织解剖有非常清晰的认识且经验丰富的医师才能施行, 并且这类经皮内固定技术通常严重依赖术中透视图像引导, 而术中X线暴露过多问题以及由于图像显示不足而引起的螺钉误置等问题一直未得到很好的解决[14]。
Crowl等[15]报告使用透视辅助进行经皮置入1枚前柱螺钉需要透视62次, 而本实验的机器人组在术中透视次数上平均不高于8次, 在透视时间上明显低于对照组(P< 0.001), 表现出明显的优势, 这对于临床有重要意义, 可以改变从前为回避大剂量放射损害而放弃采用经皮手术的微创术式而选择切开复位这种损伤大且并发症发生率高的手术方式[16], 从而创造一个安全的微创手术环境。
另外, 在传统影像透视辅助经皮置入骨盆髋臼螺钉手术中, 往往出现置入导针位置不满意的情况, 为了保证手术安全必须重新置入导针, 从而导致手术时间延长, 医患的放射损害增加[17], 并且由于骨盆有些置入螺钉位置相对狭窄, 重新调整导针的位置操作受到之前误操作的干扰, 使得调整导针位置操作更为困难, 甚至有时导致操作失败或造成副损伤等并发症的发生[18]。因此使用机器人系统辅助手术减少了导针调整的次数(P< 0.003), 使得传统的高难度手术操作变得简单、快捷和安全。
在手术时间方面, 采用机器人辅助手术和传统的透视引导徒手手术用时相当, 但是考虑到随着医生对机器人系统的熟练程度的提高, 设备摆位、手术规划等操作的时间可以进一步缩短, 从而有效缩短手术总时间; 在螺钉置入的位置评价方面, 采用机器人辅助手术的螺钉全部为优, 徒手手术的螺钉57%为优, 43%为良, 可见机器人辅助手术可以达到更高的精度。
随着计算机导航技术的发展, 使用导航系统辅助对髋臼骨盆骨折进行经皮微创固定获得了满意的临床效果[19], 但实际操作中置入螺钉所需要的透视次数和导针调整次数均明显高于机器人辅助术式, 而且现在的导航系统无论是光电还是电磁导航系统都要借助人手操作, 而人手操作带来的不稳定性可能会造成手术操作的偏差, 导致螺钉误置。机器人系统由于使用机械臂辅助螺钉置入, 明显降低了人手操作的不稳定性, 提高了手术精度和安全性。
本研究使用的TiRobot骨科手术机器人是一种能够适用于股骨颈、骨盆、全脊柱节段的多适应证外科手术机器人平台, 利用六自由度机械臂扩展有效的手术活动空间, 并通过光学跟踪系统实时跟踪术中手术路径和患者术中位置的变化, 通过自动的反馈补偿操作更正路径偏差, 从而实现精确可靠的手术路径定位, 这解决了以往导航系统不能发现由于手术过程中发生定位部件松动所产生的导航不准确的情况, 降低了因系统结构原因产生的定位误差, 从而满足骨盆和髋臼微创内固定手术对于手术操作精度高的定位需求, 同时也能够弥补传统的手术导航技术无法解决的徒手操作稳定性差的问题。
本研究临床试验经验:(1)由于进行闭合复位的移位性骨折更适用于采用经皮微创固定手术, 因此筛选试验对象时, 选择能够进行闭合复位的患者作为研究对象。(2)机器人辅助经皮骶髂螺钉内固定手术需要严格按照规范的使用流程进行操作, 术中操作的每一步骤都需要仔细按照操作说明进行, 包括机器人摆位、手术工具安装、手术图像采集、手术路径规划、螺钉置入等, 机器人摆位时要合理布置机器人(机械臂执行机构、主控系统以及光学跟踪系统)的位置, 既满足机器人进行手术操作的需要又满足医生进行术中操作的需要, 末端配套手术工具要保证工具安装到位, 以保证后续手术操作的顺利进行, 并保证系统的精度, 患者示踪器的安装要牢固, 避免触碰光学跟踪小球, 以免降低其精度, 在置钉操作前需首先安装导向套筒, 要避免因用力过猛破坏预先规划好的手术路径走向, 若操作有误, 需要进行调整或重新安装, 术中置入导针时也要避免因用力过猛损坏导针, 使得导针弯曲偏离正确的轨道, 降低置入的精确性。
由于临床上髋臼骨盆骨折患者发病率不高, 其中可以采用闭合复位, 经皮微创固定的病例有限, 因而本研究入组病例数量相对较少。本研究采用的手术时间、术中透视时间、导针调整次数、螺钉置入位置评价等指标, 在手术过程中和术后CT拍摄完成后即可获得, 无需进行术后随访。本课题组下一步将进行病例的长期随访, 研究手术的长期效益; 同时继续扩大研究病例数, 对外科手术机器人辅助螺钉内固定治疗髋臼骨盆骨折手术效果进行更全面和准确的评价。
综上所述, 外科手术机器人适用于经皮螺钉内固定治疗骨盆和髋臼骨折手术, 具有置入准确性高、透视辐射小、安全有效的优点。
(本文编辑:王 蕾)
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|