
{kind=link}
{kind=link}
{kind=link}
机器人辅助脑瘫儿童踝关节康复临床初步研究
[王荣丽1 , 周志浩2 , 席宇诚1 , 王启宁2 , 王宁华1, △  , 黄真
, 黄真1, △ ]
, 黄真]
|
|


脑性瘫痪(cerebral palsy, 简称脑瘫)是由于在胎儿或婴儿大脑发育过程中发生的非进行性脑损伤所导致的持续性运动和姿势障碍, 并引发活动受限的临床综合征[1]。尽管孕期及围产期护理水平改善, 但脑瘫的总体患病率在过去40余年仍一直稳定在活产儿的2.0‰ ~3.5‰ [2, 3, 4, 5, 6, 7, 8], 在早产儿中的患病率远高于足月儿, 并且随着胎龄和出生体重的减少而增加[3, 4]。
脑瘫可以导致患儿肌肉骨骼系统发生继发性改变, 如:肌肉力弱、痉挛、关节活动范围受限和进展性的关节僵硬[9], 从而造成日常生活活动受限。特别是由于患儿还处于生长发育期, 这种肌肉骨骼系统的继发改变会直接影响患儿的正常生长发育, 严重者会导致关节挛缩畸形和丧失活动能力, 其中踝关节受影响尤为显著, 严重者可导致马蹄内翻足畸形。因此, 对患儿的关节, 尤其是踝关节进行主被动牵伸, 维持良好的软组织延展性与关节活动范围, 一直是脑瘫康复的重点。由于牵伸时会造成一定的不适感或疼痛, 患儿往往不能顺利配合治疗, 依从性较差, 且被动牵伸需要占用较大的人力成本, 持续时间和力度不好掌握, 常常会影响牵伸的效果, 导致康复不能取得满意的疗效。因此, 本研究尝试将智能型儿童踝关节康复机器人用于脑瘫患儿的康复治疗, 以初步评价该设备在临床应用的可行性和即刻康复疗效。
本研究开始前获得北京大学第一医院伦理委员会审查批准, 所有研究对象均来自北京大学第一医院康复医学科门诊, 试验前签署知情同意书。共计6名受试者参与试验, 诊断均为脑瘫(痉挛型, 双侧瘫), 其中女性患儿4名, 平均年龄7岁(4~13岁), 所有受试者均存在双侧踝关节跖屈肌群痉挛, 踝背屈活动范围受限。
所有受试者入组后均由同一测试者和记录者进行临床信息采集, 包括受试者基本信息(年龄、性别), 踝关节康复机器人训练前后应用改良Tardieu量表(Modified Tardieu Scale)评测踝关节痉挛程度。
在之前的研究中, 针对脑卒中患者的踝关节运动功能障碍, 我们开展了相应的机器人辅助康复研究工作[10, 11]。根据临床应用中对脑瘫儿童踝关节康复的需求, 本研究在已有的脑瘫康复机器人基础上[12], 提出了一套改进的踝关节康复机器人系统RARS-Ⅱ (robotic ankle-foot rehabilitation system), 设计中主要考虑踝关节智能控制、康复过程中的人机交互。该系统包含机器人座椅、多自由调节平台、踝关节驱动模块、交互界面等。踝关节康复的基本形式为:患者坐在座椅上, 由多自由度系统调节肢体到达一个舒适的康复体位, 然后近端肢体妥善固定, 待康复关节(即踝关节)与智能控制的驱动模块进行人机交互。另外, 多自由度系统也可以满足不同患者身高、体长比例的要求。对于操纵者(比如物理治疗师)和机器人之间的人机交互, 考虑了如何通过改进机器人结构, 降低操纵者花费的体力和时间, 满足医生需要的易操作性, 进而提高机器人的使用效率和使用频率。对于使用者(比如患者)和机器人的人机交互, 考虑了如何让患者方便进入设备、如何保证在合适康复体位下达到舒适性、如何实现关节驱动的安全性等。考虑到患者为儿童, 人机交互界面以游戏的方式代替传统任务, 增加趣味性, 吸引患儿兴趣。
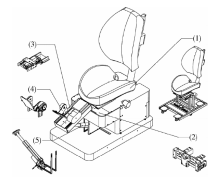
根据国标GB/T-26158, 不同年龄的儿童身体尺寸差异很大, 如果要适应所有的人体尺寸, 则设备复杂度以及体积会大大增加, 而且也会影响设备可用性。所以根据国标尺寸的分布, 本文设计的机器人可满足100~150 cm身高的儿童使用。整套机器人系统采用模块化设计, 针对功能将机器人划分为以下五个模块:主体结构及定制座椅、左右侧调节模块、腿长调节模块、小腿倾角调节模块和踝关节康复模块(图1)。其中, 左右侧调节模块用于不同受试者的患侧不同以及同一受试者双侧调整使用; 腿长调节模块用于根据不同身高被试的腿长变化进行调节, 调节范围为10 cm; 小腿倾角调节模块用于调节膝关节角度, 调节范围为0° ~60° , 实现不同的康复体位, 比如不同角度的屈膝位、伸膝位。以上三个自由度的调整, 在被试初次训练前使用遥控器控制电控系统调整到合适位置, 在后续的训练中, 机器人会根据被试记录自动调节到历史位置, 减少训练前的准备工作和治疗师的体力工作, 提高机器人使用效率。
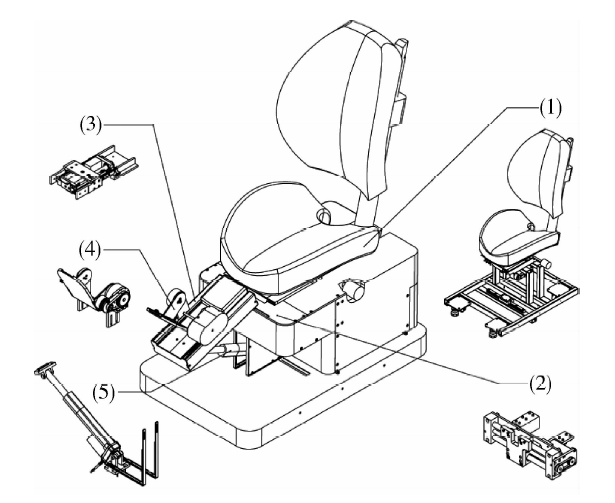 | 图1 康复机器人结构示意图Figure 1 The structure of the proposed RARS (1) the adjustable seat; (2) the lateral-medial adjustment; (3) the shank length adjustment module; (4) the joint actuation system; (5) the shank obliquity adjustment module. |
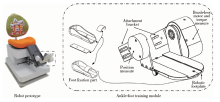
对足踝进行干预运动是由踝关节康复模块单元完成的(图1、2), 该康复模块通过直流电机驱动, 最大连续输出力矩为30 Nm, 最大转速为75° /s。被试踝关节通过足托组件固定在机器人脚板上, 脚板由直流电机和传动机构实现运动控制, 内部集成了关节位置、速度和力矩测量的高精度传感器, 能够准确、安全地控制踝关节运动, 并能实时记录康复过程中的数据。
 | 图2 康复机器人样机Figure 2 RARS prototype |
该机器人控制系统采用基于现场可编程门阵列(field-programable gate, FPGA)的嵌入式系统, 实现了对踝关节的力矩、速度和位置的闭环控制, 可以根据训练任务, 选择脚板的运动模式。控制指令和实时数据通过无线网络传感与计算机的交互软件进行通讯, 在康复训练中, 治疗师和受试者可以实时看到运动的关节位置、力矩等关节参数以及训练任务参数(图3)。
 | 图3 患者使用康复设备牵伸过程Figure 3 Experiment procedure |
本研究采用了被动训练和静态牵伸组合的训练方法。在开始训练前, 通过手动测量测得受试者踝关节角度的范围, 设定被动训练的关节运动范围。每组训练包含10个周期, 一个周期定义为从关节中立位开始, 机器人脚板先朝踝背屈方向运动, 到达最大背屈角度, 静态牵伸10 s, 然后朝跖屈方向运动, 到达指定跖屈角度, 放松10 s, 最后回到关节中立位。每个被试进行5组训练, 两组训练间隔时间为3 min。在被动牵拉过程中, 常规的方法为匀速运动, 本实验中机器人采用智能速度控制。在运动范围中段, 由于对抗力矩比较小, 机器人脚板运动速度快; 在关节末端, 由于对抗力矩比较大, 机器人脚板运动速度会相应变慢。这种速度-力矩控制方法, 可以使得在有效时间内完成更多次数的牵伸, 而且也能提高牵伸的安全性, 防止在范围末端由于速度过快, 造成关节二次损伤。
1.5.1 改良Tardieu量表 通过改良Tardieu量表评测患儿训练前后双侧腓肠肌(伸膝位)和比目鱼肌(屈膝位)痉挛程度, 具体操作方法为:患儿取仰卧放松体位, 测试者一手握住患儿一侧小腿远端, 一手握住患儿足部, 以尽可能快的速度背屈踝关节, 出现卡住现象时立即停止, 记录者测量并记录此时的踝关节背屈角度, 即R1; 测试者再次以尽可能慢的速度背屈患儿踝关节, 到关节活动范围末端(受限处)停止, 记录者测量并记录此时的踝关节背屈角度, 即R2。再以同样的方式分别评测对侧的腓肠肌和比目鱼肌的R1和R2。
1.5.2 踝关节被动背屈时测定的跖屈阻抗力矩 通过训练前后机器人设备在患儿放松状态下不同踝关节背屈角度(0° 、10° 、20° 、30° )所测定的跖屈阻抗力矩值, 即踝关节缓慢被动牵伸时所受到的阻力, 来反映造成肌张力增高的非神经性成分(即挛缩)的严重程度。
采用SPSS 19.0软件进行分析, 对训练前后的量表及定量指标采用配对t检验, P< 0.05为差异有统计学意义。
所有受试者训练后腓肠肌痉挛改良Tardieu评测的R1和R2角度均较训练前显著增加(P值分别为0.003和0.029), 而R2与R1之间的差值训练前后差异无统计学意义(P=0.67, 表2)。
| 表2 伸膝状态下的改良Tardieu量表结果 Table 2 Modified Tardieu Scale with knee extension |
所有受试者训练后比目鱼肌痉挛改良Tardieu评测的R1和R2角度均较训练前显著增加(P值分别为0.002和0.034), 而R2与R1之间的差值训练前后差异无统计学意义(P=0.455, 表3)。
| 表3 屈膝状态下的改良Tardieu量表结果 Table 3 Modified Tardieu Scale with knee flexion |
所有受试者踝背屈各角度下(0° 、10° 、20° 、30° )测定的跖屈阻抗力矩(Nm), 训练后均较训练前显著下降(P均小于0.05, 表4)。
| 表4 不同关节角度下跖屈阻抗力矩 Table 4 Ankle plantar flexion resistance torque under different angles/(N· m) |
痉挛型脑瘫是脑瘫中最为常见的类型, 约占所有脑瘫患儿的80%[1], 其典型表现是肌张力增高和姿势异常。造成脑瘫患儿肌张力增高的因素有神经性因素(痉挛)和非神经性因素(挛缩)[13]。改良Tardieu量表是临床上评测下肢痉挛的有效工具, 具有较高的信度和效度[14]。该量表通过分别测量快速被动牵伸所引起的牵张反射的角度(R1)和慢速被动牵伸至关节活动范围受限的角度(R2), 来评测引起肌张力增高的神经性因素(痉挛)和非神经性因素(挛缩)。R2目前被广泛认为可测量引起肌张力增高的非神经性因素[14, 15], 而对于神经性因素的测定, 则R2与R1的差值比单独R1更有参考价值[16]。R2与R1差值被认为是可量化肌肉张力增高的神经性因素, 其差值越大, 痉挛越严重[15]。针对痉挛和挛缩, 临床常见的干预手段之一是通过被动牵伸减轻痉挛, 增加软组织延展性, 改善关节活动范围。因此, 在针对踝关节的康复机器人研究中, 被动牵伸成为最常用的机器人干预方法[17, 18]。
然而, 目前很多机器人研究关注在踝关节驱动的设计和控制中, 并没有考虑实际临床使用过程中患者姿态位置的调节, 导致临床治疗前需要非常耗时耗力的准备工作。而且踝关节被动牵伸过程中要求近端肢体妥善固定, 按标准体位摆放, 防止代偿动作。而当患者肢体通过绑带或其他形式固定在机器人设备上, 人体运动与机器人运动会相互耦合, 不恰当的运动会给患者带来二次伤害, 因此, 对于人机交互的安全性提出了很大挑战。机器人康复过程中的安全性问题应作为机器人设计和智能控制的首要问题。本文所提出的针对脑瘫儿童设计的踝关节康复机器人系统, 是在前期研发的针对成人的踝关节康复机器人系统基础上进一步针对儿童特点设计研发的, 可以满足康复坐姿和小腿摆放位置的自动调节和安全固定, 从机械设计、传感系统和智能控制层面, 充分考虑了机器人的安全性问题。同时考虑到使用对象为儿童, 为避免操作过程中的安全隐患, 对设备进行了相应的改进, 如移动部件的位置以避免好奇心造成误操作, 去除外露的活动性零部件避免误吞, 以及将交互界面以游戏的形式呈现以吸引患儿兴趣等。前期研发的针对成人的踝关节康复机器人系统已在脑卒中患者中进行临床可行性和有效性验证, 证实设备临床应用安全有效[10, 11, 12]。
本研究对6例不同年龄(3~13岁)的脑瘫患儿进行儿童型踝关节康复机器人训练, 训练过程中发现该设备深受治疗师、患儿和患儿家长的欢迎, 患儿依从性高, 愿意配合治疗, 训练全程注意力集中于反馈的屏幕上, 未发生1例哭闹、拒绝训练的现象; 治疗师和家长在一定程度上节省了体力; 相比较传统的人工被动牵伸, 此设备可以提供与患者踝关节功能状况个体化匹配的牵伸力度, 舒适度和趣味性更强, 更易于被患儿接受, 且可以有效避免牵伸力度不当所造成的继发损伤。至于牵伸效果方面, 所有受试者单次训练后跖屈肌群的Tardieu量表R1和R2角度均较训练前显著增加, 不同踝背屈角度下跖屈阻抗力矩均较训练前显著下降, 提示跖屈肌群的延展性和顺应性较训练前有明显增加, 该设备对于跖屈肌群挛缩有显著的即刻改善效应。而R2与R1差值在训练前后无显著改善, 提示单次的训练对于跖屈肌群痉挛的即刻改善作用不明显。其原因考虑可能有以下两点:(1)Tardieu量表自身的局限性。Tardieu量表需要依赖评测者被动背屈患儿踝关节时主动感觉何时出现阻力, 并在初次感觉到阻力的角度立即停止, 让记录者记录此时的踝关节角度, 获得R1。此操作过程中易存在一定的误差, 尤其是当跖屈肌群延展性及顺应性增加时, 阻力的出现可能不会有明显卡住的现象, 造成R1的误差增加。(2)研究方法的局限性。本研究为该设备在脑瘫患儿临床应用的初步试用性研究, 因考虑到患儿全部为门诊患儿, 难以保证规律的康复就诊时间, 故仅设计为单次训练前后的观察, 主要是观察该设备在临床应用的可行性、易操作性和患儿接受程度, 而单次训练可能对于痉挛的改善效果非常有限。而且本研究样本量较小, 仅入组了6例脑瘫儿童, 可能不足以反映该设备的实际康复疗效。
综上所述, 本文所提出的儿童型踝关节康复机器人具备改善脑瘫患儿跖屈肌群挛缩和软组织顺应性的即刻疗效, 且操作简便、患儿接受度和配合度良好, 可以极大地节省康复人力成本, 避免牵伸力度和速度控制不当所造成的继发损伤。但可能由于本研究存在的一些局限性, 并未发现该设备对于痉挛有明显的改善作用, 有待下一步采用更为客观的痉挛评测方式和大样本长期训练的临床研究及随访, 以观察该设备的长期疗效。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|