Journal of Peking University (Health Sciences) ›› 2025, Vol. 57 ›› Issue (4): 779-783. doi: 10.19723/j.issn.1671-167X.2025.04.024
Previous Articles Next Articles
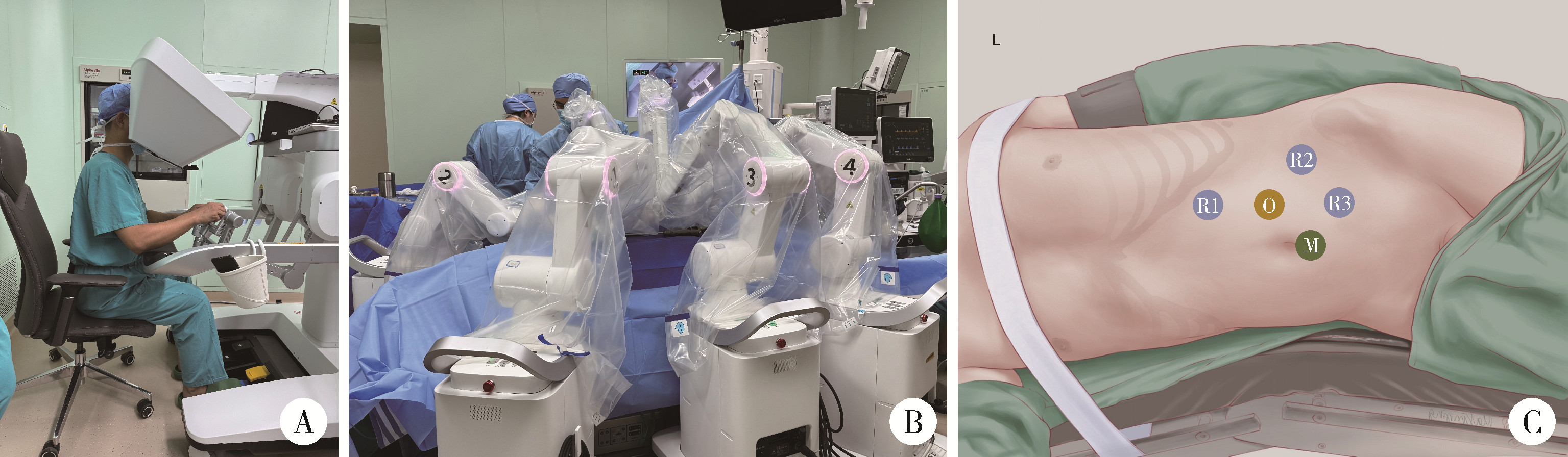
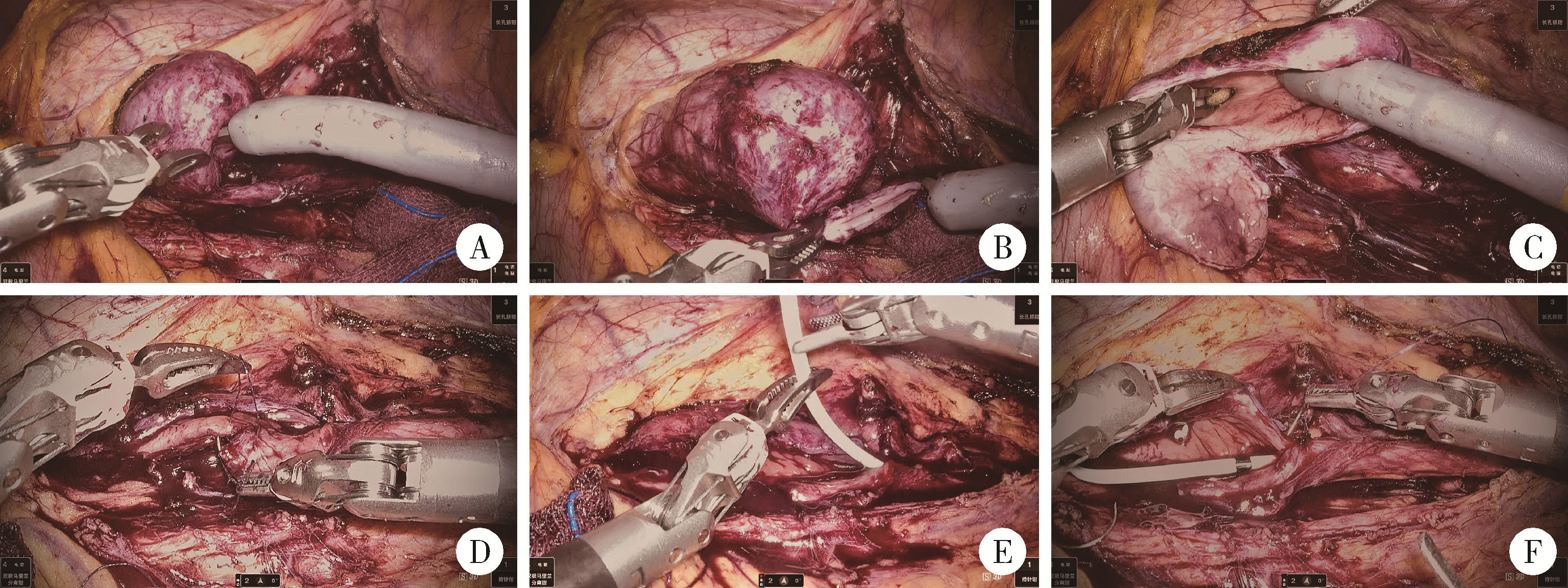
Evaluation of the feasibility and safety of a Chinese developed modular surgical robotic system for robot-assisted pyeloplasty
Shihao LIU1, Liqing XU1, Xinfei LI1, Kunlin YANG1, Zhaoying LI1,2, Zibo ZHANG1,2, Xiang WANG1, Wei-xiao FU1, Zhihua LI1,2,*( ), Xuesong LI1,*()
), Xuesong LI1,*()
- 1. Department of Urology, Peking University First Hospital; Institute of Urology, Peking University; National Urological Cancer Center, Beijing 100034, China
2. Nursing Department, Peking University First Hospital, Beijing 100034, China
CLC Number:
- R693.2


| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
郑浩轲, 于栓宝, 王泽远, 等. 国产模块化手术机器人系统辅助肾部分切除术的可行性和安全性分析[J]. 临床泌尿外科杂志, 2025, 40 (1): 39- 42.
|
| 6 |
|
| 7 |
应沂岑, 杜毅聪, 李志华, 等. 机器人辅助腹腔镜下颊黏膜补片输尿管成形术治疗复杂输尿管狭窄[J]. 北京大学学报(医学版), 2024, 56 (4): 640- 645.
doi: 10.19723/j.issn.1671-167X.2024.04.016 |
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
李学松, 樊书菠, 熊盛炜, 等. 国产内窥镜手术机器人系统在肾部分切除术中的初步临床应用[J]. 中华泌尿外科杂志, 2021, 42 (5): 375- 380.
|
| 18 |
张忠, 代海涛, 刘远华, 等. 图迈国产机器人辅助腹腔镜在泌尿外科手术中的安全性研究[J]. 微创泌尿外科杂志, 2023, 12 (4): 229- 232.
|
| 19 |
|
| 20 |
|
| [1] | Bin LI, Han LIANG. Robotic gastrectomy: Research progress and practical challenges [J]. Journal of Peking University (Health Sciences), 2026, 58(2): 416-422. |
| [2] | Jiale GAO, Zhongtao ZHANG. Current status and future perspectives of precision treatment for locally advanced rectal cancer [J]. Journal of Peking University (Health Sciences), 2026, 58(2): 247-250. |
| [3] | Shuai LIU, Zhuo LIU, Yunhe GUAN, Guoliang WANG, Xiaojun TIAN, Hongxian ZHANG, Lei LIU, Lulin MA, Shudong ZHANG. Robot-assisted laparoscopic inferior vena cava segmental resection for renal tumor with tumor thrombus invading the vascular wall [J]. Journal of Peking University (Health Sciences), 2025, 57(4): 796-802. |
| [4] | Huanrui WANG, Shicong LAI, Haopu HU, Zehua DING, Tao XU, Hao HU. Efficacy analysis of laparoscopy combined with flexible ureteroscope in the treatment of complex ureteral stricture [J]. Journal of Peking University (Health Sciences), 2025, 57(4): 784-788. |
| [5] | Qiming ZHANG, Zebo CHEN, Yu TIAN, Dameng PAN, Lei LIU, Hongxian ZHANG, Lei ZHAO, Shudong ZHANG, Lulin MA, Xiaofei HOU. Experience summary of robot-assisted laparoscopic transplant nephrectomy [J]. Journal of Peking University (Health Sciences), 2025, 57(4): 666-669. |
| [6] | Zonghan LI, Yangyue HUANG, Ning LI, Minglei LI, Hongcheng SONG, Weiping ZHANG, Chao LIU. Preliminary application of domestic single-port serpentine arm robotic surgical system in children's pyeloplasty [J]. Journal of Peking University (Health Sciences), 2025, 57(4): 662-665. |
| [7] | Yicen YING,Yicong DU,Zhihua LI,Yiming ZHANG,Xinfei LI,Bing WANG,Peng ZHANG,Hongjian ZHU,Liqun ZHOU,Kunlin YANG,Xuesong LI. Robot-assisted laparoscopic ureteroplasty with buccal mucosa graft for complex ureteral stricture [J]. Journal of Peking University (Health Sciences), 2024, 56(4): 640-645. |
| [8] | Li-zhe AN,Liu-lin XIONG,Liang CHEN,Huan-rui WANG,Wei-nan CHEN,Xiao-bo HUANG. Laparoscopic pyeloplasty combined with ultrasonic lithotripsy via nephroscope for treatment of ureteropelvic junction obstruction with renal calculi [J]. Journal of Peking University (Health Sciences), 2022, 54(4): 746-750. |
| [9] | Wei ZUO,Fei GAO,Chang-wei YUAN,Sheng-wei XIONG,Zhi-hua LI,Lei ZHANG,Kun-lin YANG,Xin-fei LI,Liang LIU,Lai WEI,Peng ZHANG,Bing WANG,Ya-ming GU,Hong-jian ZHU,Zheng ZHAO,Xue-song LI. Trends in upper urinary tract reconstruction surgery over a decade based on a multi-center database [J]. Journal of Peking University (Health Sciences), 2022, 54(4): 692-698. |
| [10] | HAO Han,LIU Yue,CHEN Yu-ke,SI Long-mei,ZHANG Meng,FAN Yu,ZHANG Zhong-yuan,TANG Qi,ZHANG Lei,WU Shi-liang,SONG Yi,LIN Jian,ZHAO Zheng,SHEN Cheng,YU Wei,HAN Wen-ke. Evaluating continence recovery time after robot-assisted radical prostatectomy [J]. Journal of Peking University (Health Sciences), 2021, 53(4): 697-703. |
| [11] | Sheng-wei XIONG,Jie WANG,Wei-jie ZHU,Si-da CHENG,Lei ZHANG,Xue-song LI,Li-qun ZHOU. Advance in re-do pyeloplasty for the management of recurrent ureteropelvic junction obstruction after surgery [J]. Journal of Peking University (Health Sciences), 2020, 52(4): 794-798. |
| [12] | Si-da CHENG,Xin-fei LI,Sheng-wei XIONG,Shu-bo FAN,Jie WANG,Wei-jie ZHU,Zi-ao LI,Guang-pu DING,Ting YU,Wan-qiang LI,Yong-ming SUN,Kun-lin YANG,Lei ZHANG,Han HAO,Xue-song LI,Li-qun ZHOU. Robot-assisted laparoscopic upper urinary tract reconstruction surgery: A review of 108 cases by a single surgeon [J]. Journal of Peking University (Health Sciences), 2020, 52(4): 771-779. |
| [13] | Meng-meng ZHENG,Guang-pu DING,Wei-jie ZHU,Kun-lin YANG,Shu-bo FAN,Bao GUAN,Xin-fei LI,Yu-kun CAI,Jin-sheng ZHANG,Xue-song LI,Li-qun ZHOU. Application of preoperative three-dimensional image reconstruction in the treatment of ureteropelvic junction obstruction [J]. Journal of Peking University (Health Sciences), 2020, 52(4): 705-710. |
| [14] | Hai-yue ZHAO,Xiong-jun YE,Wei-nan CHEN,Li-zhe AN,Jun LIU,Liu-lin XIONG,Xiao-bo HUANG. Treatment of crossing vessels in laparoscopic pyeloplasty [J]. Journal of Peking University(Health Sciences), 2019, 51(4): 660-664. |
| [15] | CHEN Wei-nan, YE Xiong-jun, LIU Shi-jun, XIONG Liu-lin, HUANG Xiao-bo, XU Tao, WANG Xiao-feng. Comparison of three surgical methods of ureteropelvic junction obstruction in therapeutic effect and complication [J]. Journal of Peking University(Health Sciences), 2016, 48(5): 817-821. |
|
||