
先天性肾盂输尿管连接部梗阻(ureteropelvic junction obstruction, UPJO)是造成儿童肾积水的最常见的一种泌尿系统畸形,UPJO在儿童群体中的总发生率约为1 ∶ 1 500,且以男性多见,男女比约为2 ∶ 1[1]。标准的开放Anderson-Hynes术式仍被视为治疗儿童UPJO的金标准[2]。近年来,随着微创理念和技术装备的发展,腹腔镜肾盂成形术(laparoscopic pyeloplasty, LP)、机器人辅助腹腔镜肾盂成形术(robotic-assisted laparoscopic pyeloplasty, RALP)在儿童UPJO的治疗中被广泛应用。相比于开放肾盂成形术,LP手术具有微创、减少疼痛、缩短术后恢复时间的优势,且具有与开放术式近乎相似的成功率[3-4]。然而,LP对于术者的腔镜下操作技术有一定的要求,尤其是对于较小年龄的患者,其腹腔内操作空间有限,腔镜下的缝合和打结等操作具有一定挑战性。RALP的出现,尤其是以国外的达芬奇机器人手术系统(da Vinci SP surgical system)为代表,将微创技术水平带到了新的高度,其提供的三维手术视野和高度灵活的机械臂,很大程度上降低了精细化手术操作的难度[5]。但是,RALP的主要缺点是费用昂贵,使得这项技术无法在绝大多数诊疗中心推广。
1 资料与方法
1.1 患者纳入及排除标准
收集自2023年11月至2024年2月采用术锐单孔蛇形臂机器人手术系统开展UPJO肾盂成形术的儿童患者资料。纳入标准:(1)诊断为UPJO;(2)达到手术治疗指征(美国胎儿泌尿外科协会分级为Ⅲ、Ⅳ级或出现腹痛、呕吐等临床症状);(3)充分了解并接受采用该手术系统行肾盂形成术。排除标准:(1)非首次接受手术治疗;(2)其他原因导致的肾积水(如膀胱输尿管连接部梗阻、后尿道瓣膜、泌尿系结石、膀胱输尿管反流、输尿管囊肿等);(3)合并其他泌尿系畸形(如重复肾、先天性肾发育不良等);(4)患侧肾严重萎缩、泌尿系感染严重或肾功能严重低下。
本研究已通过北京儿童医院医学伦理委员会审查批准(审批号[2024]-E-163-R)。
1.2 手术系统
国产术锐单孔蛇形臂机器人手术系统(北京术锐机器人股份有限公司)由手术操控台(含3D高清显示器)、手术设备台车(可容纳4个机械臂)、可弯曲的蛇形机械臂和操作器械组成。4个蛇形机械臂远端通过配套的单孔多腔道套管置入患者体内,各机械臂在体内展开后的工作平面呈三角形,从而避免了“筷子效应”“反向操作”等弊端。
1.3 手术方法
患者健侧卧位,经脐缘纵切口长约2.5 cm,置入单孔机器人操作孔,注入二氧化碳气体,建立气腹。在镜头监视下于患侧下腹穿刺操作通道做为辅助孔,连接机器人操作臂(图 1A),游离结肠内侧系膜窗或结肠外侧后腹膜,显露肾下极、肾盂和输尿管(图 1B)。肾盂前壁经腹腔外侧悬吊牵引线,充分游离交接部粘连(图 1C)。裁剪肾盂和输尿管交接部狭窄处送组织病理检查(图 1D)。输尿管近端内侧纵行剪开1 cm,以利于与斜行裁剪的肾盂壁吻合(图 1E)。以5-0可吸收线连续缝合肾盂输尿管,先缝合外侧壁(图 1F),之后放入双J管,一端可进入膀胱,一端置于肾盂内(图 1G),再缝合内侧壁,关闭肾盂(图 1H)。检查无活动性腹腔内出血,摆放好肾盂输尿管连接部,无扭曲。经下腹辅助通道置入硅胶管为腹腔引流管,逐层关闭伤口,经尿道膀胱内留置导尿管引流尿液。手术过程中,避免蛇形机械臂在屏幕视野外弯曲造成不必要的副损伤。
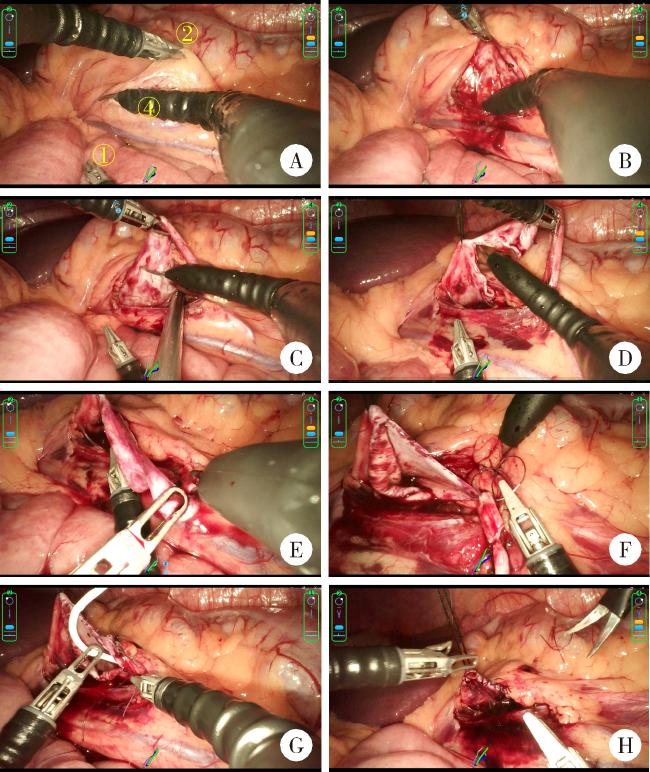
图1 术中关键步骤对应图(以1例左侧肾积水患者为例)Figure 1 Key intraoperative steps and corresponding images (take a patient with left hydronephrosis as an example) A, robotic arm configuration: Arm ① (bottom) is the needle holder, Arm ② (left) is the bipolar forceps, Arm ④ (right) is the monopolar curved scissors; B, free the left descending colon mesentery; C, dissection of the ureteropelvic junction (UPJ); D, renal pelvis trimming; E, the ureter is incised distally from the stricture; F, continuous suturing of the posterior wall between the ureter and renal pelvis; G, placement of a double-J stent; H, continuous suturing of the anterior wall between the ureter and renal pelvis. |
记录手术时间、术中切口数量、切口大小、出血量、围手术期并发症等。随访患者至术后6个月,统计分析患者术前、术后6个月的肾盂前后径(anteroposterior pelvic diameter, APD)和肾皮质厚度的变化情况。
1.4 统计学方法
数据分析采用SPSS 26.0统计分析软件。对于连续变量,符合正态分布的采用${\bar x}$±s表示,不符合正态分布的采用M (P25, P75)表示,使用Wil-coxon符号秩检验分析配对数据的差异,P < 0.05为差异有统计学意义。
2 结果
自2023年11月至2024年2月,本研究共纳入10例患者,男8例,女2例,平均年龄(10.20±3.12)岁,9例为左侧,1例为右侧,患者平均身高为(142.0±17.8) cm,平均体重为(37.6±17.9) kg。所有患者均通过术锐单孔蛇形臂机器人手术系统完成手术,无中转开腹病例。总手术时间为(237±96) min,手术台操作时间为(162.0±69.3) min,术中出血量为5.00 (2.25, 5.00) mL,术后围手术期均未出现出血、尿外渗、发热、切口愈合不良等并发症。术前APD中位值为2.95 (2.12, 5.25) cm,术后6个月APD中位值为1.70 (1.50, 2.75) cm,二者间差异有统计学意义(P=0.005)。术前肾皮质厚度的中位值为0.50 (0.43, 0.88) cm,术后6个月该值为(1.05±0.37) cm,术后肾皮质厚度显著增加(P=0.011)。
3 讨论
达芬奇机器人手术系统的诞生在一定程度上解决了传统腹腔镜技术学习曲线长、腹腔内缝合等操作难度大、三维操作视野缺乏或较差的弊端。Gettman等[9]于2002年报道了借助达芬奇手术系统的RALP在儿童患者中的应用。2020年,RALP术式已成为美国青少年UPJO治疗的金标准[10]。国内有学者对比了LP和借助达芬奇手术系统的RALP在婴幼儿群体中的应用,发现借助达芬奇手术系统的RALP在婴幼儿群体中是安全、有效的,且疗效与LP相当[11]。但是,多孔机器人辅助腔镜系统在儿童群体,尤其是低龄患儿群体中,仍然面临着腹腔内操作空间狭小的客观问题。Katagiri等[12]报道了单孔机器人腹腔镜手术在儿童患者中的应用,单孔多通道的这一技术改进有效改善了儿童腹腔内操作空间有限的问题,但仍存在术者和助手相互干扰的问题。针对这一短板,单孔加一辅助孔的技术,将机器人手术系统的主操作孔独立了出来,在减少了术者与助手相互干扰影响的同时,也展现出了较好的安全有效性[13]。但是,由于达芬奇单孔机器人手术系统的成本及使用花费较大,目前在国内尚未普及,限制了这一技术在儿童泌尿外科领域的推广和应用。
本研究采用国产术锐单孔蛇形臂机器人手术系统顺利完成了10例儿童UPJO肾盂成形术,该国产手术系统在设计结构上与国外的达芬奇单孔机器人手术系统有所不同。达芬奇系统的灵活性主要依靠电缆驱动机械臂“手腕”结构,而国产术锐系统的蛇形机械臂具有远端和近端两组连续的构节,两组构节的弯曲方向相反,工作状态下,体外的近端构节带动体内的远端构节运动,得益于蛇形的设计结构,术野内的远端构节可以达到135°的最大弯曲角度,拥有较好的灵活性。蛇形机械臂内部由20根超弹性镍钛合金结构骨组成,每根结构骨均可单独受力,不但能增强蛇形机械臂的结构强度,也能保障术中少量结构骨发生故障时,机械臂整体的稳定性与安全性。本研究使用的手术系统的机械臂工作距离为≥7 cm,相比于达芬奇单孔手术系统的12 cm,有着较大的优势,能够适用于低龄、手术操作空间更小的儿童。
迄今为止,国产术锐单孔蛇形臂机器人手术系统在儿童UPJO肾盂成形术中的应用研究尚未见相关文献可供参考,我们现阶段的初步研究结果显示,与达芬奇单孔机器人手术系统行儿童UPJO的既往研究[13]相比,总手术时长更长些[(237±96) min vs. (169.80±18.88) min]。造成这一结果的原因可能有以下几种:(1)使用国产术锐单孔机器人手术系统尚处于初步阶段,术者的经验还在不断积累之中;(2)目前的10例手术是由4位医师分别完成的,其中3位主任医师(分别完成2例、2例、1例)、1位副主任医师(完成5例),3位主任医师的手术时间相对较长,而1位副主任医师独自完成5例后,其总手术时间为(176.20±32.74) min,这与既往使用达芬奇手术系统的的总手术时间相差不大。此外,所有患者均无明显围手术期并发症,在出血量方面,本研究也与既往研究[13]结果相近[5.00 (2.25, 5.00) mL vs. (6.10±2.28) mL]。
基于本组10例患者,我们对术锐机器人系统进行儿童UPJO肾盂成形术的围手术期要点进行了总结:(1)因单孔机器人蛇形臂的工作距离需≥7 cm,距离过短则会导致机械臂无法完全展开,影响手术操作,故需尽量选取身高较高的患者,本研究中的最小患者为6岁,身高115 cm。目前,我们正在研发测试新型气囊port,可将机器人鞘管回缩至体外,有望进一步增加手术空间,下探手术年龄。(2)手术开展初期可以增加辅助通道,便于术中进行牵拉、吸引等操作,提高手术安全性。我们选取脐与患侧髂前上棘连线外1/3处放置辅助通道,可减少对机械臂的碰撞和相互干扰,随着技术不断熟练,可逐渐取消辅助通道。(3)儿童腹腔空间小,术前需做好肠道准备,减轻肠道积气,可减少肠道对术野和操作空间的影响。
本研究尚存在一些不足,首先,由于应用国产术锐单孔蛇形臂机器人手术系统这一新的手术平台,为前瞻性临床队列研究,纳入的病例数量较少,且为多术者操作,可能存在术者对新平台不甚熟悉的情况;其次,本研究结果只适用于与同病种应用达芬奇机器人手术系统的以往研究结果相比较。
综上所述,运用国产术锐单孔蛇形臂机器人手术系统开展儿童UPJO肾盂成形术是安全、可行的,手术效果良好,可在国内多数诊疗中心推广和应用。

{kind=link}
{kind=link}