北京大学学报(医学版) ›› 2022, Vol. 54 ›› Issue (1): 146-152. doi: 10.19723/j.issn.1671-167X.2022.01.023
动态导航下不同深度环钻定位精确度的体外评价
刘思民1,赵一姣2,王晓燕1,王祖华1,△( )
)
- 1.北京大学口腔医学院·口腔医院 牙体牙髓科,北京 100081
2.北京大学口腔医学院·口腔医院 口腔医学数字化研究中心,国家口腔医学中心,国家口腔疾病临床医学研究中心,口腔数字化医疗技术和材料国家工程实验室,口腔数字医学北京市重点实验室,国家卫生健康委员会口腔医学计算机应用工程技术研究中心,北京 100081
In vitro evaluation of positioning accuracy of trephine bur at different depths by dynamic navigation
LIU Si-min1,ZHAO Yi-jiao2,WANG Xiao-yan1,WANG Zu-hua1,△()
- 1. Department of Conservative Dentistry and Endodontics, Peking University School and Hospital of Stomatology, Beijing 100081, China
2. Center for Digital Dentistry, Peking University School and Hospital of Stomatology & National Center of Stomatology & National Clinical Research Center for Oral Diseases & National Engineering Laboratory for Digital and Material Technology of Stomatology & Beijing Key Laboratory of Digital Stomatology & NHC Research Center of Engineering and Technology for Computerized Dentistry, Beijing 100081, China
摘要:
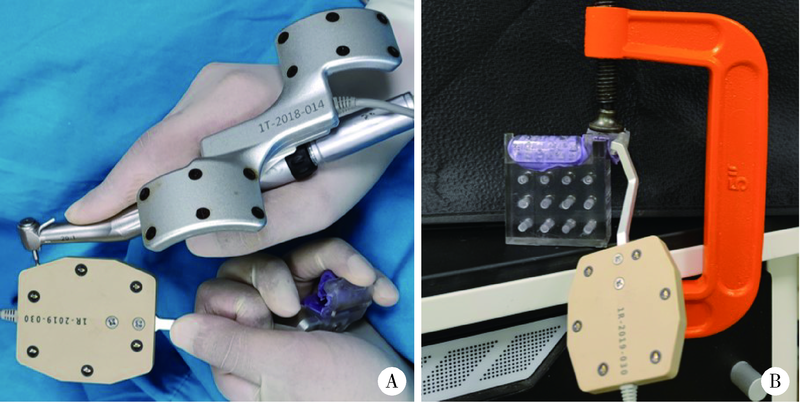
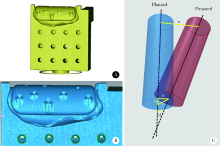
目的: 通过3D打印的体外模型评价使用动态导航系统引导下环钻在不同深度定位的精确度。方法: 设计并使用3D打印技术以Veroclear树脂制作标准化模型,分别在距离模型外表面5、10、15 mm深度预留半球型空腔。拍摄锥形束CT(cone beam CT,CBCT)并将数据导入动态导航软件中(迪凯尔公司,中国),建立导航路径规划。在导航引导下使用直径4.5 mm的环钻完成入路操作,每个深度完成10例入路。拍摄术后模型的CBCT,重建导航下的入路轨迹,并与设计路径进行对比,计算实际动态导航路径与设计路径之间的二维距离偏差、深度偏差、三维距离偏差及角度偏差。结果: 5 mm深度下动态导航终点位置与目标位置的二维距离偏差为(0.37±0.06) mm、深度偏差为(0.06±0.05) mm、三维距离偏差为(0.38±0.07) mm、角度偏差为2.46°±0.54°;10 mm深度下动态导航终点位置与目标位置的4项偏差分别为(0.44±0.05) mm、(0.16±0.06) mm、(0.47±0.05) mm、2.45°±1.21°;15 mm深度下动态导航终点位置与目标位置的4项偏差分别为(0.52±0.14) mm、(0.16±0.07) mm、(0.55±0.15) mm、3.25°±1.22°。随着进入深度的增加,动态导航系统的三维及深度精确度均下降(P<0.01),定位角度偏差与进入深度无关(P>0.01)。结论: 动态导航技术在15 mm的深度范围内仍可以达到较高的定位精确度,但其偏差值随着进入深度的增加而增大。
中图分类号:
- R783.3






| [1] |
Bobek SL. Applications of navigation for orthognathic surgery[J]. Oral Maxillofac Surg Clin North Am, 2014, 26(4):587-598.
doi: 10.1016/j.coms.2014.08.003 |
| [2] | Wadley J, Dorward N, Kitchen N, et al. Pre-operative planning and intra-operative guidance in modern neurosurgery: A review of 300 cases[J]. Ann R Coll Surg Engl, 1999, 81(4):217-225. |
| [3] |
Bell RB. Computer planning and intraoperative navigation in orthognathic surgery[J]. J Oral Maxillofac Surg, 2011, 69(3):592-605.
doi: 10.1016/j.joms.2009.06.030 |
| [4] |
Emery RW, Merritt SA, Lank K, et al. Accuracy of dynamic navigation for dental implant placement-model-based evaluation[J]. J Oral Implantol, 2016, 42(5):399-405.
doi: 10.1563/aaid-joi-D-16-00025 |
| [5] |
Block MS, Emery RW, Cullum DR, et al. Implant placement is more accurate using dynamic navigation[J]. J Oral Maxillofac Surg, 2017, 75(7):1377-1386.
doi: 10.1016/j.joms.2017.02.026 |
| [6] |
Zubizarreta-Macho Á, Muñoz AP, Deglow ER, et al. Accuracy of computer-aided dynamic navigation compared to computer-aided static procedure for endodontic access cavities: An in vitro study[J]. J Clin Med, 2020, 9(1):129.
doi: 10.3390/jcm9010129 |
| [7] |
Dianat O, Nosrat A, Mostoufi B, et al. Accuracy and efficiency of guided root-end resection using a dynamic navigation system: A human cadaver study[J]. Int Endodo J, 2021, 54(5):793-801.
doi: 10.1111/iej.v54.5 |
| [8] |
Jain SD, Carrico CK, Bermanis I. 3-dimensional accuracy of dynamic navigation technology in locating calcified canals[J]. J Endod, 2020, 46(6):839-845.
doi: 10.1016/j.joen.2020.03.014 |
| [9] |
Wu D, Zhou L, Yang J, et al. Accuracy of dynamic navigation compared to static surgical guide for dental implant placement[J]. Int J Implant Dent, 2020, 6(1):78.
doi: 10.1186/s40729-020-00272-0 |
| [10] |
Wei SM, Zhu Y, Wei JX, et al. Accuracy of dynamic navigation in implant surgery: A systematic review and meta-analysis[J]. Clin Oral Implants Res, 2021, 32(4):383-393.
doi: 10.1111/clr.v32.4 |
| [11] |
Gambarini G, Galli M, Morese A, et al. Precision of dynamic navigation to perform endodontic ultraconservative access cavities: A preliminary in vitro analysis[J]. J Endod, 2020, 46(9):1286-1290.
doi: S0099-2399(20)30385-X pmid: 32553875 |
| [12] | Aydemir CA, Arısan V. Accuracy of dental implant placement via dynamic navigation or the freehand method: A split-mouth rando-mized controlled clinical trial[J]. Clin Oral Implants Res, 2020, 31(3):255-263. |
| [13] |
Mediavilla Guzmán A, Riad Deglow E, Zubizarreta-Macho Á, et al. Accuracy of computer-aided dynamic navigation compared to computer-aided static navigation for dental implant placement: An in vitro study[J]. J Clin Med, 2019, 8(12):2123.
doi: 10.3390/jcm8122123 |
| [14] |
Pellegrino G, Taraschi V, Andrea Z, et al. Dynamic navigation: A prospective clinical trial to evaluate the accuracy of implant placement[J]. Int J Comput Dent, 2019, 22(2):139-147.
pmid: 31134220 |
| [15] |
Hawkins TK, Wealleans JA, Pratt AM, et al. Targeted endodontic microsurgery and endodontic microsurgery: A surgical simulation comparison[J]. Int Endod J, 2020, 53(5):715-722.
doi: 10.1111/iej.13243 pmid: 31674678 |
| [16] |
Christofzik D, Bartols A, Faheem MK, et al. Shaping ability of four root canal instrumentation systems in simulated 3D-printed root canal models[J]. PLoS One, 2018, 13(8):e0201129.
doi: 10.1371/journal.pone.0201129 |
| [17] |
Nagy E, Fráter M, Antal M. Guided modern endodontic microsurgery by use of a trephine bur[J]. Orv Hetil, 2020, 161(30):1260-1265.
doi: 10.1556/650.2020.31778 |
| [18] |
Buniag AG, Pratt AM, Ray JJ. Targeted endodontic microsurgery: A retrospective outcomes assessment of 24 cases[J]. J Endod, 2021, 47(5):762-769.
doi: 10.1016/j.joen.2021.01.007 |
| [19] |
Collyer J. Stereotactic navigation in oral and maxillofacial surgery[J]. Br J Oral Maxillofac Surg, 2010, 48(2):79-83.
doi: 10.1016/j.bjoms.2009.04.037 pmid: 20061072 |
| [20] |
Popowicz W, Palatyńska-Ulatowska A, Kohli MR. Targeted endodontic microsurgery: Computed tomography-based guided stent approach with platelet-rich fibrin graft: A report of 2 cases[J]. J Endod, 2019, 45(12):1535-1542.
doi: S0099-2399(19)30626-0 pmid: 31606146 |
| [21] |
Rismanchian M, Bajoghli F, Gholamreza T, et al. Dental implants: Early versus standard two-stage loading (animal study)[J]. J Oral Implant, 2014, 40(1):84-93.
doi: 10.1563/AAID-JOI-D-10-00202 |
| [22] |
Gambarini G, Galli M, Stefanelli LV, et al. Endodontic microsurgery using dynamic navigation system: A case report[J]. J Endod, 2019, 45(11):1397-1402.
doi: S0099-2399(19)30544-8 pmid: 31515047 |
| [1] | 白晓强, 袁芷若, 周永胜, 吕珑薇. 动态牵张促进人骨髓间充质干细胞三维培养的成骨分化[J]. 北京大学学报(医学版), 2026, 58(3): 641-649. |
| [2] | 温奥楠, 张晓会, 杨咏涛, 高梓翔, 李文博, 单珅瑶, 商相宜, 田淯文, 郭殊玮, 王艺蓁, 王勇, 赵一姣. 基于非刚性配准构建三维颜面微笑仿真序列数据的方法[J]. 北京大学学报(医学版), 2026, 58(1): 139-144. |
| [3] | 邵梁, 马雯洁, 陈莹, 丁茜, 张磊. 上颌切牙前伸和正中咬合接触解剖特征的数字化测量与分析[J]. 北京大学学报(医学版), 2026, 58(1): 99-106. |
| [4] | 赵健霄, 丁茜, 李文锦, 马全诠, 兰一笑, 张磊, 韩建民. 多孔表面结构对立体光固化成型氧化锆疲劳强度的影响[J]. 北京大学学报(医学版), 2025, 57(6): 1165-1173. |
| [5] | 宋凤岐, 徐心雨, 刘筱菁, 李自力. 上颌骨前部和整体顺时针旋转改善骨性Ⅲ类牙颌面畸形患者鼻旁凹陷的对比[J]. 北京大学学报(医学版), 2025, 57(5): 980-988. |
| [6] | 肖宇嘉, 毛渤淳, 周彦恒. 姿势性微笑的三维形态学研究[J]. 北京大学学报(医学版), 2025, 57(5): 989-995. |
| [7] | 闵树元, 田耘. 3D打印生物可降解WE43镁合金支架的生物相容性及对骨缺损的治疗[J]. 北京大学学报(医学版), 2025, 57(2): 309-316. |
| [8] | 仇师禹, 练洋, 康一帆, 张雷, 蔡义望, 单小峰, 蔡志刚. 基于下颌骨数据库和全连接神经网络的三维检索模型辅助下的下颌骨个性化重建[J]. 北京大学学报(医学版), 2025, 57(2): 360-368. |
| [9] | 马丽娟, 腾雍辉, 王勇, 赵一姣, 张馨月, 秦庆钊, 尹东. 乳牙缺失数字化丝圈间隙保持器的三维有限元分析[J]. 北京大学学报(医学版), 2025, 57(2): 376-383. |
| [10] | 朱玉佳, 沈华, 温奥楠, 高梓翔, 秦庆钊, 单珅瑶, 李文博, 傅湘玲, 赵一姣, 王勇. 三维颌面对称参考平面智能构建的深度学习算法[J]. 北京大学学报(医学版), 2025, 57(1): 113-120. |
| [11] | 徐昕恺, 赵建江, 田素坤, 刘中宁, 赵晓一, 赵晓波, 江腾飞, 陈晓军, 马超, 孙玉春. 集成压缩气流系统扫描头辅助获取液体干扰表面三维数据精度评价[J]. 北京大学学报(医学版), 2025, 57(1): 121-127. |
| [12] | 吴灵, 方嘉琨, 刘筱菁, 李自力, 李阳, 王晓霞. 基于牙颌面畸形患者三维颅面特征相似性度量模型的建立及评估[J]. 北京大学学报(医学版), 2025, 57(1): 128-135. |
| [13] | 李虹, 马斐斐, 翁金龙, 杜阳, 吴彬彰, 孙凤. 口腔即刻种植时动态导航系统的种植精度分析[J]. 北京大学学报(医学版), 2025, 57(1): 85-90. |
| [14] | 唐祖南,胡耒豪,陈震,于尧,章文博,彭歆. 增强现实技术在口腔颌面颈部解剖识别中的应用评价[J]. 北京大学学报(医学版), 2024, 56(3): 541-545. |
| [15] | 展新新,曹露露,项东,汤皓,夏丹丹,林红. 成型方向对3D打印口腔义齿基托树脂材料物理性能及力学性能的影响[J]. 北京大学学报(医学版), 2024, 56(2): 345-351. |
|
||
